
Class 4: Arduino Programming
The electronics covered here were inside of my kinematic sculpture. If you want to find out more about that project click here.
Electronic Design Process:
I wanted to be able to control the speed of my sculpture without having to reprogram the ESP32 every time so I decided on using a potentiometer for that.
Schematic:
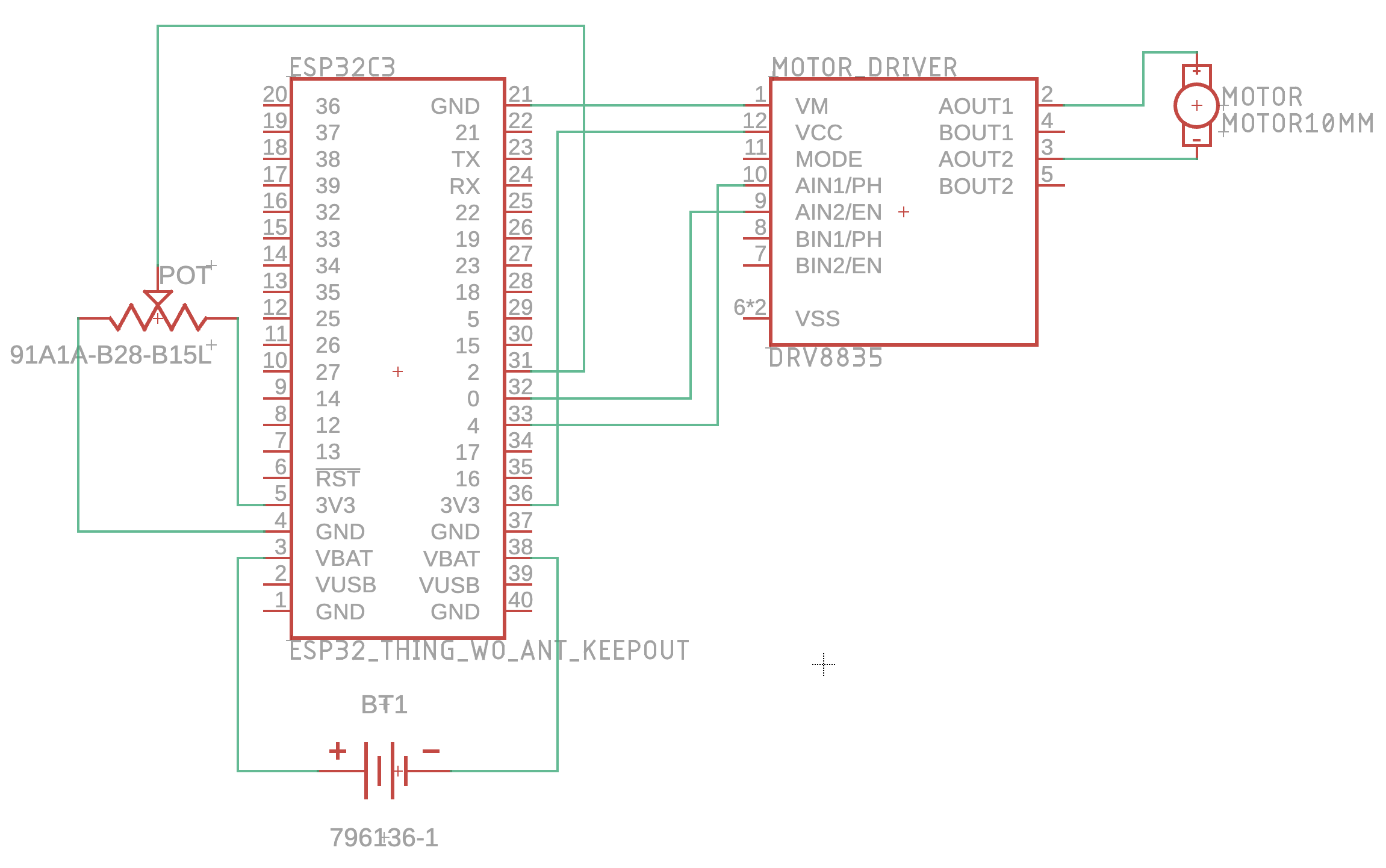
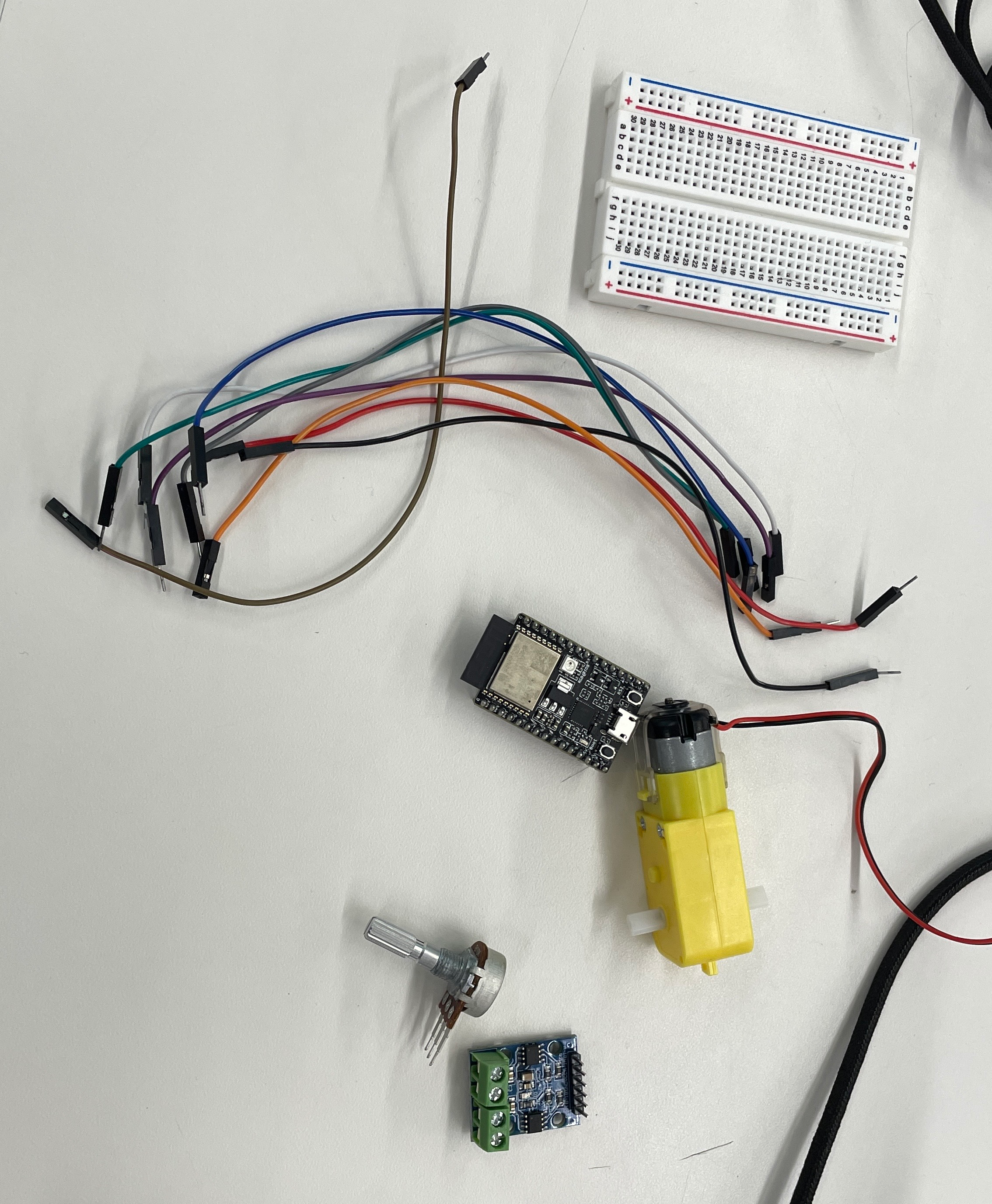
List Of Parts
- ESP32-C3 Micro Controller
- Potentiometer
- Bread Board
- Yellow Hobby Motor
- L9110S DC Motor Driver
- Bunch of wires
Build Process
After I finished designing my circuit I started constructing it.
Originally I planned to place the ESP32 inside of the breadboard like this:
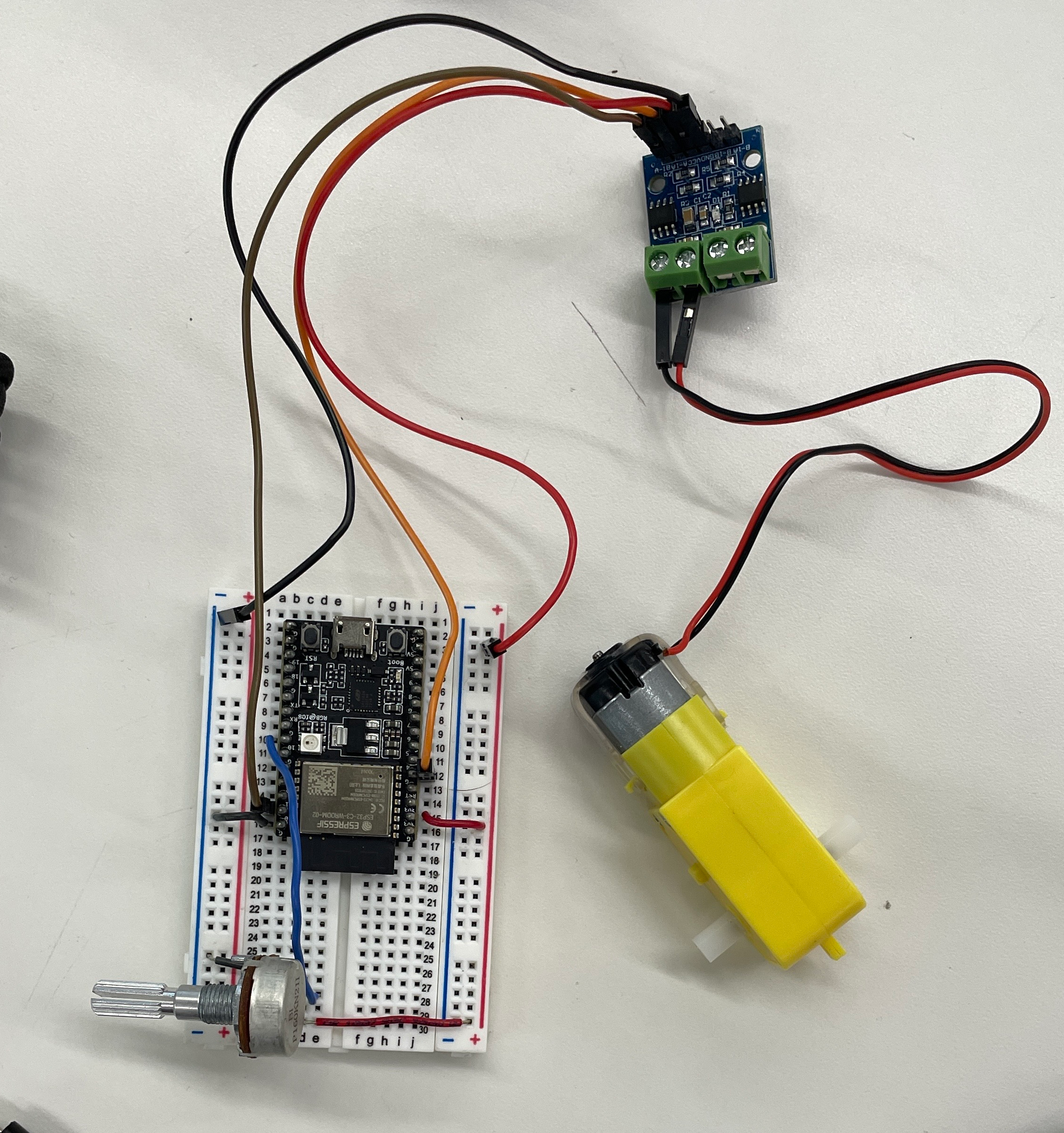
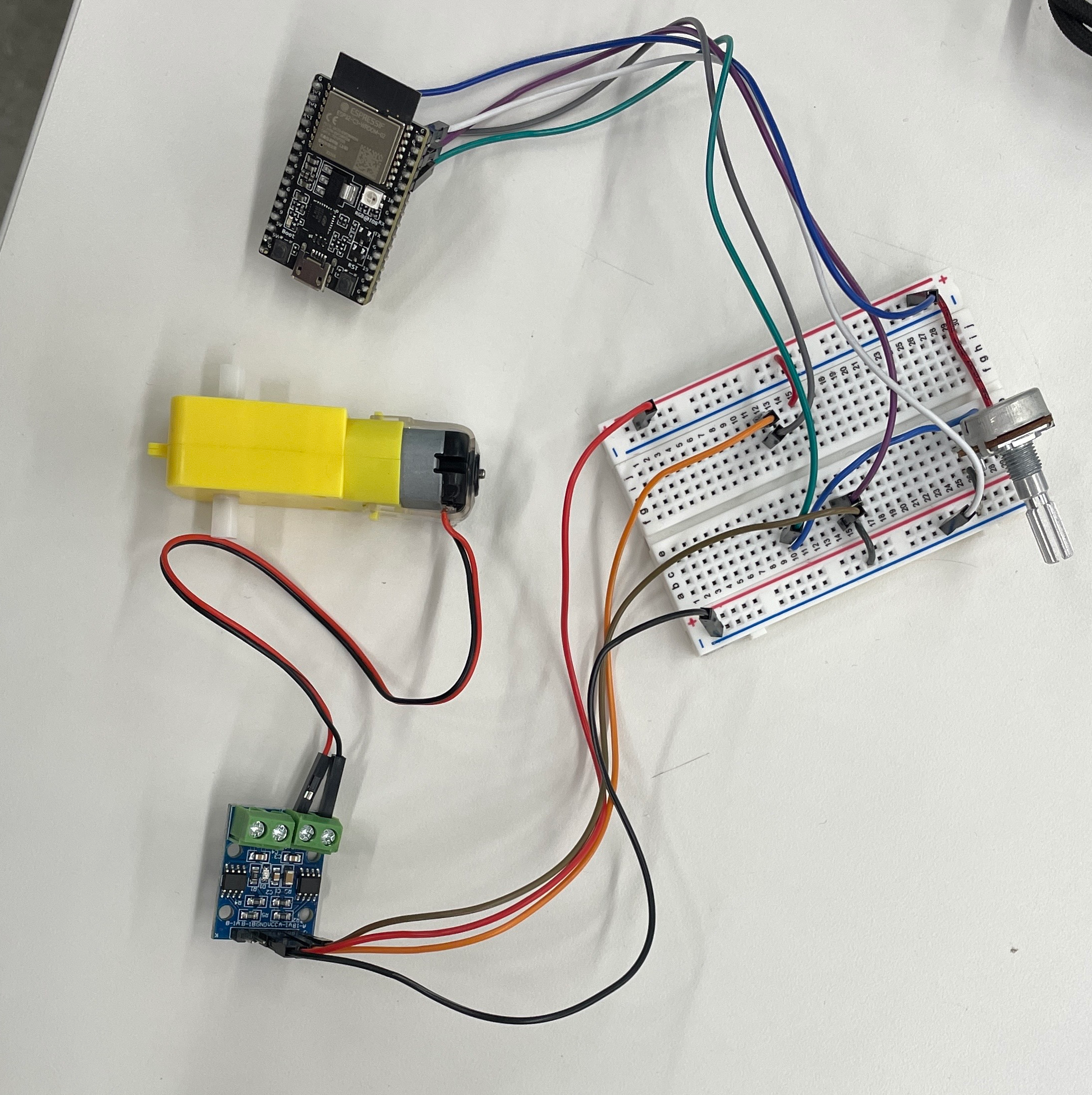
However, this caused some connection issues resulting in the motor not being able to change speeds and not being able to read data from the potentiometer, so I ended up taking the ESP32 out, which made my circuit construction just a little messier.
Arduino Programming
Now that were done with the electronics we can add some functionality. The goal here is to make the potentiometer able to control the motor speed as well as direction. We can do this by using the Arduino Map() function and get a motor speed value between -255 (the max speed backwards) and 255 (the max speed forward) based on the potentiometer's min and max values (0, 4095). here is what that code looks like:
Potentiometer value to Motor Speed
map(potentiometerValue, 0, 4095, -255, 255);
//map(value to look at, min val1, max val1, min val2, max val2)
But theres one problem, the motor controller doesn't naturally read negative values as backwards. But this is a pretty easy fix. We can write a little function to check if the motor speed value is negative or positive and based on that we can decide weather to drive the motor forward or backwards.
Actualize Motor Speed
void driveMotorsPlus(int pin1, int pin2, double motorSpeed) {
if(MotorSpeed >= 0) {
//Serial.println("Forward");
analogWrite(pin1, abs(motorSpeed));
digitalWrite(pin2, LOW);
}
else {
//Serial.println("Reverse");
analogWrite(pin1, LOW);
analogWrite(pin2, abs(MotorSpeed));
}
}
Now that we have this we can just set up some pins and create a loop.
Final Code
const int A1A = 1; // define pin 1 for A-1A (PWM Speed)
const int A1B = 4; // define pin 4 for A-1B (direction)
const int P = 3; // define pin 3 for Potentiometer value
double MotorSpeed = 0;
void setup() {
Serial.begin(115200);
analogWrite(A1A, 0); // start with the motors off
digitalWrite(A1B, LOW);
}
//function to actualize motor speed from map
void driveMotorsPlus(int pin1, int pin2, double motorSpeed) {
if(MotorSpeed >= 0) {
analogWrite(pin1, abs(motorSpeed));
digitalWrite(pin2, LOW);
}
else {
analogWrite(pin1, LOW);
analogWrite(pin2, abs(MotorSpeed));
}
}
void loop() {
//Get motor speed from potentiometer
MotorSpeed = map(analogRead(P), 0, 4095, 255, -255);
//print out motor speed vs pot value
Serial.print(analogRead(P));
Serial.print(" : ");
Serial.println(MotorSpeed);
//drive motors
driveMotorsPlus(A1A, A1B, MotorSpeed);
}
I added in a little serial output to show the relationship between the current potentiometer value and motor speed. Now were done! Heres a video of the full thing working